Description
The production run of Duet 3 Expansion 1HCL v2.0 is underway and stock is expected mid-September.
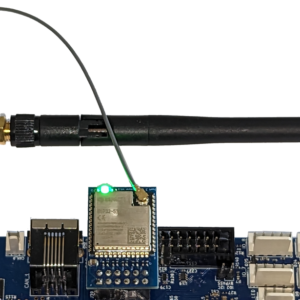
The Duet 3 Expansion 1HCL is a CAN-FD connected expansion board that is designed to provide a high current stepper motor driver, combined with multiple interfaces for position feedback. It has a number of peripheral inputs and outputs for functions such as sensing motor temperature, controlling a brake, and axis endstop. It connects to the Duet 3 CAN-FD bus using RJ11 connectors (the same as the Duet 3 Mainboard 6HC, Duet 3 Mainboard 6XD, Duet 3 expansion boards, and the tool distribution board). Multiple 1HCL boards can be daisy-chained on the bus, with power (up to 48V) provided locally. This allows for very large machines to be constructed without a significant wiring burden and signal integrity issues.
FEATURES
- Processor: ARM Cortex-M4F microcontroller running at 120MHz.
- Stepper Drivers: TMC2160A stepper driver: SPI controlled, can be run in open-loop or closed-loop mode. Maximum motor current 6.3A peak per phase (4.45A RMS).
- Connectivity: RJ11 CAN In and CAN Out connectors to connect to the Duet 3 CAN-FD bus.
- Outputs: Two medium-current (2.5A max recommended) outputs at VIN or VBRAKE voltage with PWM capability and built-in flyback diodes: out0, out1. Optionally provide VBRAKE at a different voltage from VIN to allow (for example) running the stepper motor at 48V and the brake at 24V. Note the flyback diodes are connected to the voltage being used (VBRAKE or VIN as selected).
- General IO: Two 3.3V-level PWM-capable outputs (3mA max), through 470R series resistor: io0.out, io1.out. Two digital inputs with permanent 27K pullup resistors, protected against over-voltage: io0.in, io1.in.
- Temperature Input: One thermistor/PT1000 input: temp0. This is intended to allow for motor temperature monitoring (potentially coupled with a cooling system controlled by one of the outputs).
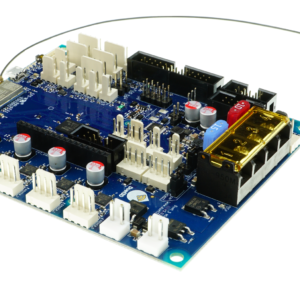
Hardware Overview